






The companies Equipos Industriales de Manutención S.A. (EINSA) and SENER Aeroespacial, in collaboration with INTA, have developed the ALANO (Autonomous Logistics Assistant to Operating Core) platform, an unmanned ground vehicle (UGV) designed entirely in Spain to support tactical dismounted units.
ALANO must initially cover the logistical support needs of a platoon or of medical evacuation operations (MEDEVAC). The vehicle was first presented to Spanish Defense Ministry officials on Monday, October 10, at the Alijares Proving Ground (Toledo), as part of the 2E+I Forum.
The ALANO project hopes to meet the needs of Spain’s Army and was carried out under the auspices of Force 35 of the Army Logistics Support Command, and consolidates the initiative that resulted in these companies being chosen for this project as part of the DGAM’s (Directorate General of Armaments and Matériel) COINCIDENTE R&D program.
The ALANO vehicle is approximately 3 m long and has a payload capacity of 650 kg. The vehicle has also been designed to reach 20 km/h, and it can travel on vertical slopes of up to 70%, and lateral slopes of up to 40%. ALANO offers a standardized, modular and open architecture and is able to integrate future work or payload modules to acquire new capabilities that will let it take part in security, surveillance and protection missions
The platform works both in remote operated mode and in autonomous navigation mode, and has the capacity to detect obstacles thanks to a combination of sensors that allow it to have a multimodal sensing system. When operating autonomously, it has both tracking mode (“follow-me”) and return mode (“go-back-home”).
In this project, EINSA is responsible for the design and manufacture of the platform, which is made of light-weight materials using additive manufacturing techniques. The vehicle has outstanding off-road capabilities on all types of surfaces, thanks to its independent 6×6 electric drive. It has been designed as an open multi-mission robotic platform that is able to adapt to the mission needs of its users.
In addition to high mobility, EINSA focused its efforts on offering a vehicle with a long-range capability by implementing optimal energy flow control through the different systems. The platform has also been equipped with a range extender, offering the platoon up to 10 hours of independence.
SENER Aeroespacial is responsible for developing the platform’s onboard real-time navigation system, which handles the geolocation of the platform and detects and identifies the position, in real time, of environmental elements, such as the road, other vehicles, obstacles, signals, etc.
It does so through a combination of multiple sensors. The data collected by these sensors is processed in real time in a processing unit, where it is merged to provide a more reliable and robust solution than that calculated by each sensor independently. Advanced data management techniques, information merging and artificial intelligence algorithms are used during the image processing.
INTA, through the Platforms and Vehicles Department of the General Sub-Directorate of Terrestrial Systems, is responsible for defining the user requirements and the system’s operational concept, and is providing support in the integration, testing and verification phases. It is doing so by offering the project its testing methods and the experience of its personnel in certifying military vehicles and in UGV projects.
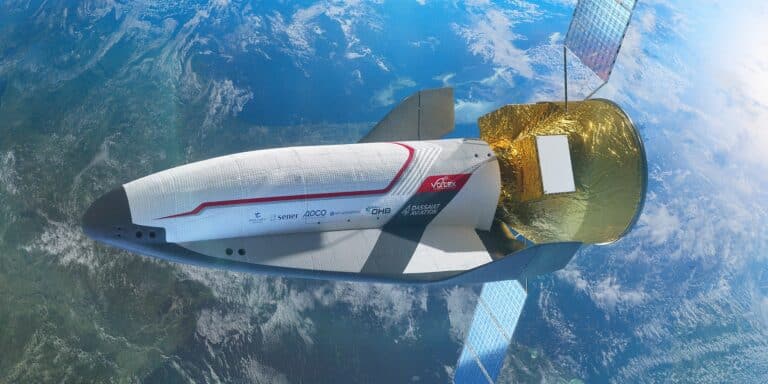
Sener joins VORTEX-S, Europe’s reusable spaceplane for future in-orbit operations
José Antonio García Cantera, new independent board member on the Board of Directors of Sener Group

Sener Foundation promotes social innovation in the 3rd edition of the SocialTech Challenge.

The Sener group reports revenue growth to €933 million in 2025, driven by strong performance across all business areas


